|
hyperledger/iroha
Iroha - A simple, decentralized ledger http://iroha.tech
|


|
|
hyperledger/iroha
Iroha - A simple, decentralized ledger http://iroha.tech
|
|
#include "torii/status_bus.hpp"#include <rxcpp/rx-lite.hpp>#include <rxcpp/operators/rx-observe_on.hpp>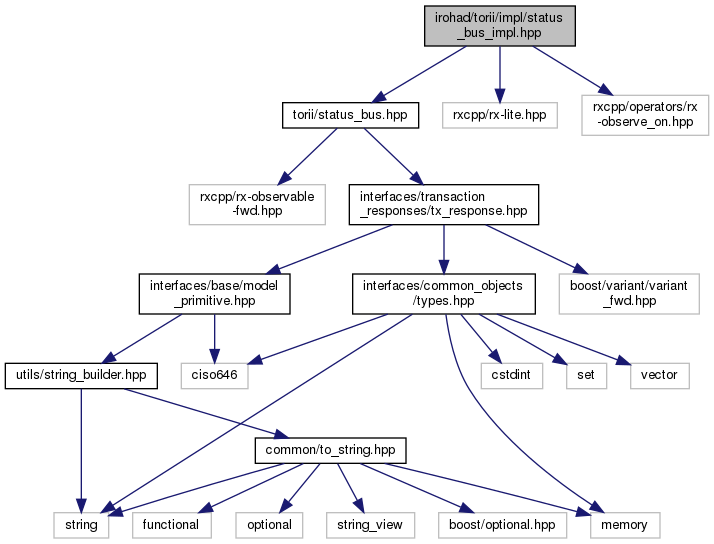
Go to the source code of this file.
Classes | |
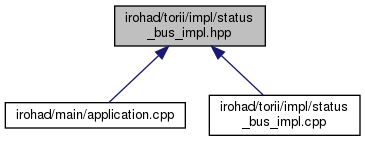
| class | iroha::torii::StatusBusImpl |
Namespaces | |
| iroha | |
| iroha::torii | |
 1.8.13
1.8.13